
这个例子演示了如何跟踪高速公路车辆周围的自动驾驶汽车。车辆是一个扩展对象,其大小跨越多个传感器分辨率单位。因此,传感器会在一次扫描中报告对这些对象的多次检测。在本例中,您将使用不同的扩展对象跟踪技术来跟踪高速公路车辆,并评估其跟踪性能的结果。
一、介绍
在传统的跟踪方法中,如全局最近邻、联合概率数据关联和多假设跟踪,假设被跟踪对象在每次传感器扫描时返回一个检测结果。随着分辨率更好的传感器(如高分辨率雷达)的发展,传感器通常会回归到对物体的多次探测。例如,下图描述了在多个雷达分辨率单元上对单个车辆的多次检测。在这种情况下,跟踪对象的技术被称为扩展对象跟踪。
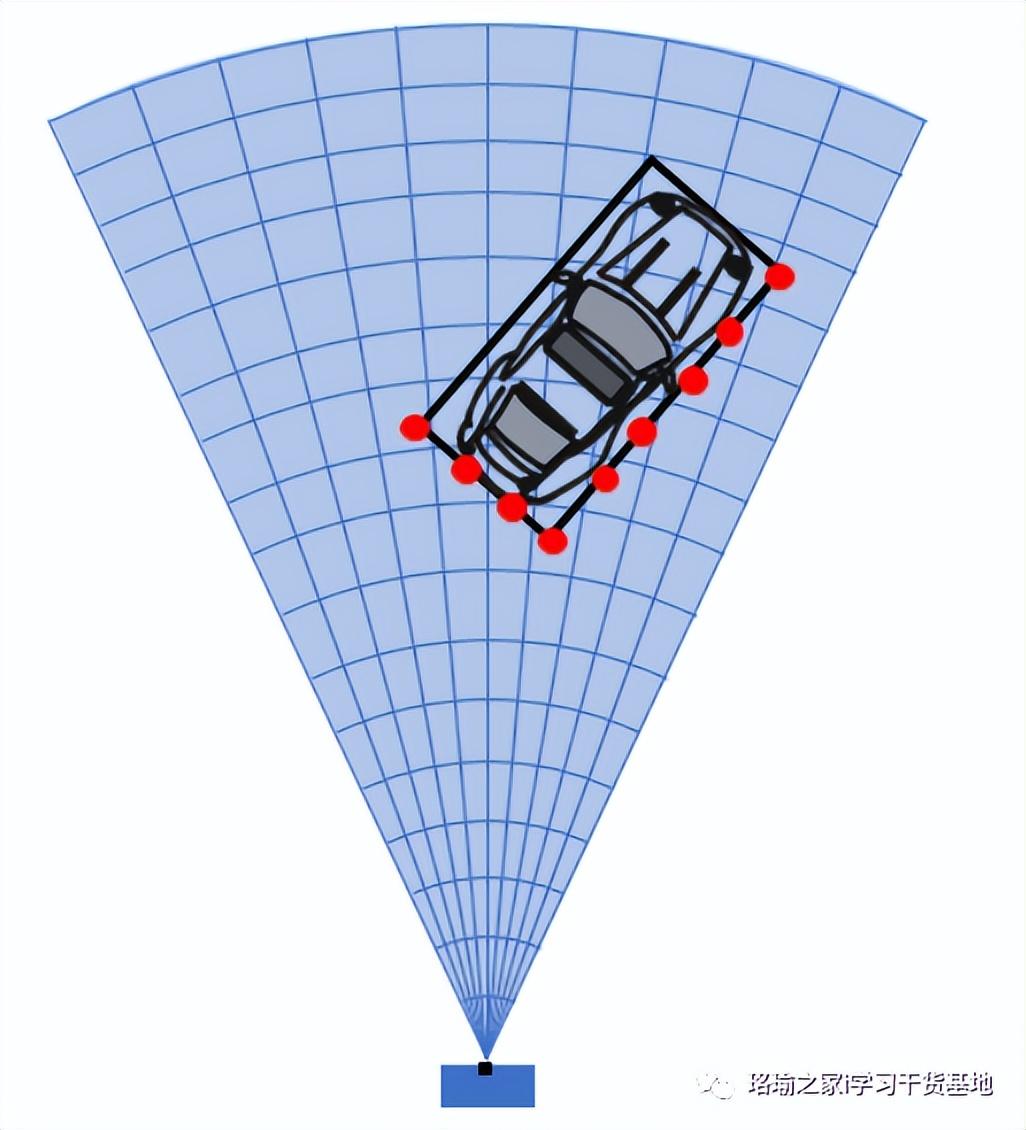
使用高分辨率传感器的主要好处是获得关于物体的更多信息,例如其大小和方向。这些附加信息可以提高检测概率,降低虚警率。
扩展对象对传统跟踪器提出了新的挑战,因为这些跟踪器假设每个传感器对每个对象只有一次检测。在某些情况下,可以对传感器数据进行聚类,以便为传统跟踪器提供每个对象的单次检测。然而,这样做可能会失去使用高分辨率传感器的好处。
相比之下,扩展的对象跟踪器可以处理每个对象的多次检测。此外,这些追踪器不仅可以估计运动状态,如物体的位置和速度,还可以估计物体的大小和方向。在该示例中,以下跟踪器可用于跟踪ego车辆周围的车辆:
使用点目标模型的传统多目标跟踪器;GGIW-PHD(伽玛高斯逆威萨特PHD)跟踪器,带滤波器;GM-PHD(高斯混合PHD)跟踪器,带有使用矩形目标模型的过滤器;
评估所有跟踪器的跟踪结果,这些结果提供了跟踪器有效性的各种度量。还将使用最优子模式分配指数(OSPA)来评估结果,该指数旨在使用综合分数来评估跟踪器的性能。
二、设置
事件
在这个例子中,有一辆自我车辆和四辆其他车辆:一辆在车道的自我车辆前面,一辆在车道,一辆在自我车辆后面,一辆卡车在右车道,一辆超车车辆在左车道。
在这个例子中,将模拟一辆自己的汽车,它有6个雷达传感器和2个视觉传感器,可以覆盖360度的视野。传感器有一些重叠和一些覆盖间隙。Ego车辆在车辆的前部和后部装有远程雷达传感器和视觉传感器。车辆两侧各有两个近程雷达传感器,每个传感器覆盖90度。从车辆的中部到后部,每侧都有一个传感器。每侧的另一个传感器从车辆中部向前覆盖。
指数
在本例中,将使用一些关键指标来评估每个跟踪器的跟踪性能。特别地,可以根据跟踪器在估计对象的位置、速度、大小(长度和宽度)和方向方面的准确度来评估跟踪器。您可以使用类别来评估这些指标。
还将根据错误磁道或冗余磁道的数量等指标来评估性能。您可以使用类别来计算这些指标。为了定义被跟踪目标和真实对象之间的距离,本示例使用了自定义误差函数,该函数列在本示例的末尾。该函数将距离度量定义为位置、速度、大小和偏航距离的总和。为跟踪算法的有效性提供了各种度量标准。还将根据最佳子模式分配指数(OSPA)评估性能,该指数为每个时间步长的跟踪算法提供单个分值。您可以使用类别来计算这个指标。为OSPA定义的“自定义”距离函数与分配索引相同。
三、点对象跟踪器
系统对象假设每个传感器的每个对象进行一次检测,并使用全局最近邻方法将检测与跟踪关联起来。它假设传感器在扫描期间最多只能检测每个对象一次。在这种情况下,模拟的雷达传感器具有足够高的分辨率来为每个对象生成多个检测。如果这些检测没有被汇总,跟踪器将为每个对象生成多个轨迹。聚类分析返回每个聚类的检测结果,代价是具有较大的不确定性协方差并丢失关于真实对象维度的信息。当两个对象彼此靠近时(例如,当一辆汽车经过另一辆汽车时),聚类也使得难以区分这两个对象。
运行该方案。这些结果表明,跟踪器可以通过聚类分析跟踪场景中的物体。但是,它也显示了与超车(黄色)相关联的轨迹从场景开始时的车辆前方移动到结束时的车辆后方。场景一开始,超车是在自拍杆车后面(蓝色),所以雷达和视觉探测是从前面进行的。超车通过自拍杆车时,先从超车侧再从其后方进行雷达探测,轨迹向车辆后方移动。
你也可以看到聚类分析并不完美。当过往车辆超过自己车辆后面的车辆(紫色)时,由于聚类不完善,两条轨迹都略微向左移动。最初,由于在某些部分缺失时会创建多个群集,因此会在磁道上创建冗余磁道。此外,在最后,冗余轨迹会出现在经过的车辆上,因为它们的检测之间的距离增加了。
四、GGIW-PHD 扩展对象跟踪器
在本节中,您将使用GGIW博士追踪器(腰带)来追踪物体。与每个轨迹使用一个滤波器不同,GGIW-PHD是一个多目标滤波器,用于描述场景的概率假设密度(PHD)。为了建立扩展目标的模型,GGIW博士使用了以下分布:
Gamma:用于描述预期测试次数的正值。
高斯:描述目标运动状态的状态向量。
逆维状态:用来描述椭圆范围的正定矩阵。
该模型假设每个分布都是相互独立的。因此,GGIW-PHD滤波器中的概率假设密度(PHD)由几个GGEW分量的概率密度函数的加权和来描述。
PHD追踪器需要计算密度中每个成分的可检测性。可探测性的计算需要与跟踪器一起使用的每个传感器的配置。您可以定义这些配置来使用该类。
清晰度跟踪器
与通常考虑检测到的分区(集群)的点对象跟踪器相反,跟踪器PHD创建一组检测到的多个可能的分区,并根据PHD过滤器中的当前组件来评估它们。以下函数中的3和5定义了检测之间的较低和较高马氏体距离。这相当于定义每个检测集群必须至少相隔3个分辨率,并且彼此至少相隔5个分辨率。辅助功能包围并且不使用距离变化率测量来划分侧雷达的探测。
运行模拟。这些结果表明,GGIW-PHD可以处理每个传感器和每个对象的多个检测,而无需首先对这些检测进行聚类。此外,通过使用多个探测器,跟踪器可以估计每个对象的位置、速度、大小和方向。图中的虚线椭圆表示目标的预期范围。过滤器初始化功能使用多个组件来指定多个可能的大小及其相对权重。该列表可以扩展以增加更多的大小,同时增加计算复杂度。相比之下,每次检查可以初始化一个组件,其大小不确定性很高。这将使跟踪器能够自动估计对象的大小。也就是说,估计的精度将取决于目标大小的可观测性,并且随着目标绕着本车运动,轨迹大小容易收缩和扩张。
GGIW-PHD滤波器假设检测分布在目标的椭圆中心周围。因此,轨迹倾向于跟随车辆的可观察部分。这种可观察的部分包括车辆的后表面,即,自身车辆的正前方或正后方。例如,车辆的后部和前部分别位于自身车辆的正前方和后方。相比之下,在模拟过程中完全观察到过往车辆的长度和宽度。因此,估计的椭圆与实际形状具有更好的重叠。
五、通用-PHD 矩形物体跟踪仪
在本节中,您将使用GM-PHD跟踪器(腰带)和矩形目标模型(旋转)来跟踪对象。不是使用椭圆形状来跟踪范围,而是允许高斯分布来定义所选择的形状。矩形目标模型由运动模型、方阵和方阵、测量模型、方阵和方位角定义。
除了定义之外,先前为跟踪器PHD定义的传感器配置保持不变。
这些结果表明,GM-PHD还可以处理每个传感器和每个对象的多次检测。与GGEW-PHD类似,它也可以估计物体的大小和方向。过滤器初始化功能使用类似于GGIW-PHD跟踪器的方法,并为不同尺寸初始化多个组件。
可以注意到,被建模为矩形的估计轨迹与由实色块描绘的模拟真实值对象非常一致。特别是,该轨迹可以正确地跟踪车辆的形状和运动中心。
六、评估跟踪性能
用量化指标(如位置、速度、大小、方向的估计误差)来评价每个跟踪器的跟踪性能。还要用冗余、错轨等指标来评价轨道分配。
分布指数
分配索引指示冗余和错误轨迹已经被点对象跟踪器初始化和确认。这些轨迹是通过不完全聚类形成的,其中属于同一目标的检测被聚类成多个聚类检测。相比之下,GGIW-博士跟踪器和通用-博士跟踪器保持对所有四个目标的跟踪,不会产生任何错误或多余的跟踪。这些度量表明,两个扩展的对象跟踪器正确地划分检测,并将它们与正确的跟踪相关联。
误差指数
该图示出了在该示例中使用的三种类型的跟踪器的平均估计误差。由于点对象跟踪器不估计对象的偏转和大小,因此它们现在显示在图形中。点目标跟踪器可以以合理的精度估计目标的运动学。ego车辆后面的车辆位置误差更高,因为当经过的车辆经过该车辆时,被拖向左侧。当对象彼此靠近时,这也是不完美聚类的产物。
如前所述,GGIW-PHD跟踪器假设测量值分布在对象的范围内,这导致了车辆可观测部分的跟踪中心。这也可以在TruthID 2和4的位置误差指示器中看到。追踪器可以以0.3米左右的精度估计物体的大小,用于前后车。由于在函数中为车辆的大小定义了更高程度的确定性,因此即使最佳拟合椭圆的长度非常短,跟踪器也不会折叠这些车辆的长度。由于在所有尺寸上观察经过的车辆(TruthID 3 ),其尺寸测量比其他车辆更精确。但由于过往车辆相对于本车的机动,偏航估计误差较高。
该示例中的GM-PHD使用矩形目标模型,并使用接收到的测量来评估目标边界上的预期测量。该模型可以帮助跟踪者更准确地估计形状和方向。然而,在矩形对象的边缘评估预期测量值的过程在计算上更昂贵。
OSPA度量
如前所述,OSPA指数旨在用单一分数描述跟踪算法的性能。请注意,OSPA完全捕获跟踪算法的性能,从GM-PHD到GGIW-PHD再到点目标跟踪器,如使用误差和分配指数中所述。
比较时间性能
之前,我了解了不同的技术,它们对目标模型的假设以及由此产生的跟踪性能。现在比较一下追踪器的运行时间。请注意,与GM-PHD滤波器相比,GGIW-PHD滤波器具有显著的计算优势,但代价是跟踪性能降低。
七、总结
此示例显示了如何使用不同的方法来跟踪在单次传感器扫描中返回多个检测结果的对象。这些方法可用于使用高分辨率传感器(如雷达或激光传感器)来跟踪物体。
八、程序
程序获取:基于Matlab,利用雷达和摄像头跟踪模拟高速公路车辆(附源代码)
程序百科:Matlab和Simulink仿真程序汇总(2022年汇总,不断更新)
免责声明:本站所有文章内容,图片,视频等均是来源于用户投稿和互联网及文摘转载整编而成,不代表本站观点,不承担相关法律责任。其著作权各归其原作者或其出版社所有。如发现本站有涉嫌抄袭侵权/违法违规的内容,侵犯到您的权益,请在线联系站长,一经查实,本站将立刻删除。